- HOME
- 温度・湿度・圧力製品部門
- 技術情報
- ナノ空間の湿度測定/発生技術
ナノ空間の湿度測定/発生技術
体積法精密湿度発生における湿度制御概念からの脱却
最近、通常環境の温湿度雰囲気だけでなく、低温低湿ならびに高温高湿の環境における特殊な温湿度測定の要求が高まっています。さらに雰囲気制御でも微小空間での温湿度制御が要求あり、弊社において顕微鏡ステージ上やMEMSなどパッケージ内温湿度制御等の研究に寄与してきました。
今後、微小空間の温湿度制御はさらに小空間化しナノレベルでの雰囲気制御が要求される事と思われます。このレポートではその具体的な雰囲気制御技術を紹介し、提案を行ないたいと思います。
湿度供給装置による発生方法の解説及び微小空間制御の実例
-
分流式湿度供給装置を使用した発生の原理
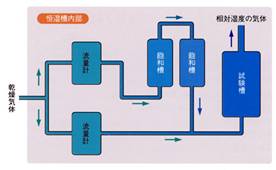
分流式湿度供給装置は完全に乾燥した空気(0%rh)を2つの流れに分け、一方は飽和槽を通して飽和空気(100%rh)とし、他方をそのまま(0%rh)で混合させ試験槽に供給します。その時の飽和空気と乾き空気の流量比により、試験槽に一定の相対湿度の気体をつくるJIS規格に基づいた極めて高精度な発生方式です。
さらに温湿供給装置は外部に空気を供給する為、外部試験槽・試験室を温度制御する事により2点温度法の発生方法も利用する事が可能になります。
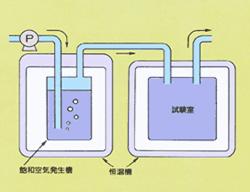
2点温度法とは、飽和空気槽と試験室の2つの部分から成り、飽和空気発生槽にて露点温度を精密に制御した飽和空気(100%rh)を作り出し、試験室内に送り込みます。そして、外部試験室内の温度と飽和槽の温度を自由にコントロールすることにより、あらゆる湿度を再現することが可能です。
分流法と2温度法を複合した2温度分流法により微小空間の湿度制御が可能になります。
-
微小空間の湿度制御とは
微小空間は通常の恒温恒湿槽レベルの空間から、さらに小さい数センチ四方の空間を想定しています。
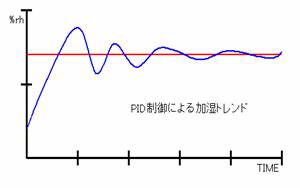
通常の湿度制御の方式は、湿度センサ等の信号を調節計にて受け、その制御信号から加湿部のヒーターなどをコントロールします。その為、空間容量が小さければ小さいほど安定まで時間がかかりオーバーシュート(ハンチング)を繰り返します。逆にそれを防止する為に加湿能力を小さくすれば、温度・湿度変化などの外乱に対し対応能力が落ちてしまいます。
湿度供給装置を使用した場合、空気供給源は基本的に外部チャンバー内に直接目的の空気を送ります。
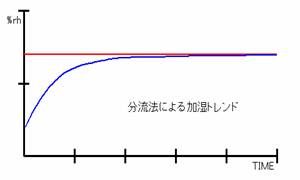
したがって制御は行わない為、設定値に対し近づく湿度トレンドを示します。応答性は湿度供給装置の発生流量と外部チャンバーの容量にて決まります。チャンバー寸法が10センチ四方の場合、十秒単位で安定へと向かいます。
最近の考え方として、湿度供給装置の発生精度は湿度センサの計測精度と同等以上となり、湿度センサのモニタリングを行わないケースも出ています。
-
微小空間制御の実例
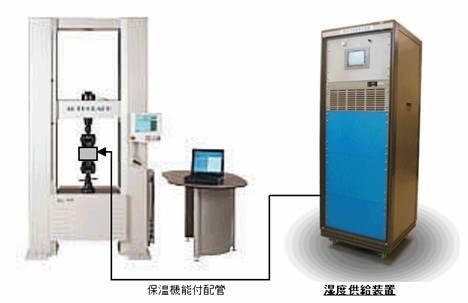
湿度により影響のでる紙、繊維等の引張り試験の実例を示します。引張り試験器で温度湿度の影響を受けやすい試験資料等を目的の温湿度環境に置き実験する場合、特殊な治具により試験資料のみの加温加湿を行なう必要があります。これは引張り試験器に設けられたロードセルの使用温度域に制限があり、試験機自体を恒温恒湿槽内に設置できない為です。湿度供給装置の流量計にマスフローメータを使用した為、長時間にわたる傾斜制御を含めたプログラム運転が可能になります。このように湿度供給装置は微小空間に優れた制御を行なうことができます。
注意点として湿度供給装置から供給された空気(ガス)では流量が小さい為、試験資料を入れる治具の温度制御は不可能となります。かならず、冶具の温度制御を行なう熱源などを組みこむ必要があります。
弊社では熱媒体を循環し温度の安定を行う方式を採用し、これにより温度安定度は飛躍的に向上いたしました。最新の事例では±0.01℃以下の微小空間の温度制御を実現しています。
また、湿度制御に関しても1.7ccの微小空間の湿度制御もあわせて実現しています。
-
ナノ空間の湿度制御とは
ナノ空間の温湿度制御では微小空間の温度制御で用いた手法、分流法を利用することが難しくなります。これは湿度制御に使用されるマスフローコントローラーの最小流量が大きく、ナノ空間に与える調湿空気では外乱要素となってしまうからです。これを解消する為に弊社では新たに体積法という湿度制御方法を開発いたしました。(特許第3969731号)
この装置は飽和槽、ドライヤー、電磁弁、シリンダー、電動アクチェエータなどの構造を持ち、従来の分流法とは異なり定量的に容積を決められるシリンダーを電動アクチェエータで駆動することにより、高分解能の湿度制御が可能な構造となっています。別図のシステム図に示されているように電動アクチェエータ、電磁弁等をシーケンサーによって制御します。動作として乾燥空気側シリンダーの吸引時にドライヤーから乾燥空気を吸引。飽和槽空気側シリンダーに飽和槽から飽和空気を吸引します。
次にWETとDRYの定量的な空気が得られる体積比から押出し量を求め、電動アクチェエータを矢印の方向に制御(下図移動速度参照)します。これにより発生した気体を混合することにより任意の湿度が得らます。
システム図
25.0℃における相対湿度 0.00% 20.00% 30.00% 40.00% 50.00% 60.00% 70.00% 80.00% 100.00% DRY 移動速度(μm/sec) 100 80.5 70.66 60.76 50.79 40.76 30.67 20.51 0 WET 移動速度(μm/sec) 0 19.5 29.34 39.24 49.21 59.24 69.33 79.49 100 分流式発生方法との相違点
-
発生精度及び再現性はシリンダーの制御分解能による。
旧方式 流量計±0.5%
参照:100μmの送り出し速度分解能を30nmとして計算
新方式 電動アクチェエータ ±0.003% -
精度を落とさずに発生流量の調整が可能。
シリンダーの送り速度を調整することにより発生流量の可変が可能。
参照:初期動作にてシリンダーを送り出し、混合部とチャンバー内の差圧を計測することにより低差圧での送り出し速度を求めることが出来る。これにより微細管内の圧損を最小限に抑えることも可能。 -
ある一定の時間ごとに原点でゼロ調節を行うことにより、ほぼシステムの経時変化はキャンセルできる。
-
常時、飽和槽にてバブリングを行わない為、蒸発潜熱による影響がない。
-
おわりに
発生装置の技術的な進歩は、ほとんど特殊環境計測からのノウハウで培われてきました。
現在、最新市場であらゆる分野でクロスオーバーするナノテクノロジーが注目されており、安定した温湿度環境構築の重要性が高まっています。今後、多種の分析機に対応できるアプリケーションの開発も進めて行きます。
第一科学も産業界の湿度計測の一助になれるよう、研究開発を進めております。